óÓ …ļ
£®áÝĺW«G÷›Ļ©ŽäĻęňĺ£¨ļĢĪĪ «G÷› 434000£©
0 “ż —‘
›ĒŽäĺĬ∑Ķń∑Ä∂®Ŗ\––ļÕį≤»ę–‘“Ľ÷Ī «ŽäѶŌĶĹyĻ‹ņŪ’ŖÍP◊ĘĶń÷ō“™ÜĖÓ}°£āųĹyĶń›ĒŽäĺĬ∑—≤ôz∑Ĺ Ĺīś‘ŕ‘S∂ŗĺ÷Ōř–‘£¨»Á–߬ ĶÕ°ĘÔLŽUłŖĶ»°£ěťŃňŅň∑ĢŖ@–©ÜĖÓ}£¨ĆW’ŖāÉƶüo»ňôC›ĒŽäĺĬ∑ŅžňŔ—≤ôz∑Ĺ∑®ŖM––ŃňŹV∑ļ—–ĺŅ£¨ŐŠ≥Ų“ĽŌĶŃ–Ąď–¬Ķń∑Ĺ∑®°£őńęI[1]Õ®Ŗ^ľ§Ļ‚íŖ√Ťę@»°ĺĬ∑Ķń»żĺSŁc‘∆ĒĶďĢ£¨≤ĘņŻ”√Łc‘∆ŐéņŪļÕ∑÷őŲň„∑®ŖM––Ļ ’Ōôzúy°£őńęI[2]ĹŤ÷ķłŖ∑÷Īś¬ ĒzŌŮÓ^ļÕąDŌŮŐéņŪľľ–g£¨Ćć¨FƶĺĬ∑Ķń◊‘Ą”ĽĮĪOúyļÕĻ ’Ō∂®őĽ°£»Ľ∂Ý£¨…Ō Ų∑Ĺ∑®īś‘ŕ—≤ôz–߬ ĶÕ°Ęú ī_–‘ĶÕĶ»ÜĖÓ}°£őń’¬ŐŠ≥ŲŃň“Ľ∑NĽý”ŕ5G Õ®–Ňľľ–gĶńüo»ňôC›ĒŽäĺĬ∑ŅžňŔ—≤ôz∑Ĺ∑®£¨“‘ŐŠłŖ—≤ôz–߬ ≤ĘĹĶĶÕ—≤ôzÔLŽU£¨éÕ÷ķĻ§◊ų»ňÜTľįērįl¨FļÕŐéņŪĺĬ∑ĶńĚď‘ŕÜĖÓ}£¨ŖM“Ľ≤ĹÉěĽĮŽäѶĻ©Ď™ĶńŅ…ŅŅ–‘ļÕ∑Ä∂®–‘°£
1 Ľý”ŕ5G Õ®–Ňľľ–gĶńüo»ňôC›ĒŽäĺĬ∑ŅžňŔ—≤ôz∑Ĺ∑®
1.1 ›ĒŽäĺĬ∑üo»ňôC—≤ôz∆ĹŇ_ŌĶĹyľ‹ėč
üo»ňôCņŻ”√ŇšāšĶń—≤ôz‘OāšļÕāųł–∆ųŖM––—≤ôz»őĄ’£¨Õ®Ŗ^5G Õ®–ŇĺWĹjŇcĶō√ś÷łď]÷––ńĹ®ŃĘĆćērŖBĹ”[3]°£Ķō√ś÷łď]÷––ńĪOĻ‹üo»ňôCĶńÔw––†ÓĎBļÕ¬∑ŹĹ£¨≤ĘĹ” ’°ĘŐéņŪüo»ňôCāų›ĒĶńąDŌŮļÕĒĶďĢ°£Õ¨ēr£¨—≤ôz∆ĹŇ_ŐŠĻ©ĒĶďĢīśÉ¶ļÕĻ‹ņŪĻ¶ń‹£¨Ī„”ŕļůņmĶń∑÷őŲļÕĹy”č[4]°£‘ď∆ĹŇ_Ćć¨FŃňłŖ–ßĶńüo»ňôC—≤ôz»őĄ’ąŐ––ļÕĒĶďĢŐéņŪĻ¶ń‹£¨ěť›ĒŽäĺĬ∑ĶńĺS◊oļÕĻ‹ņŪŐŠĻ©Ńň”–Ѷ÷ß≥÷£¨ŌĶĹyĺŖůwľ‹ėč»ÁąD1 ňý ĺ°£
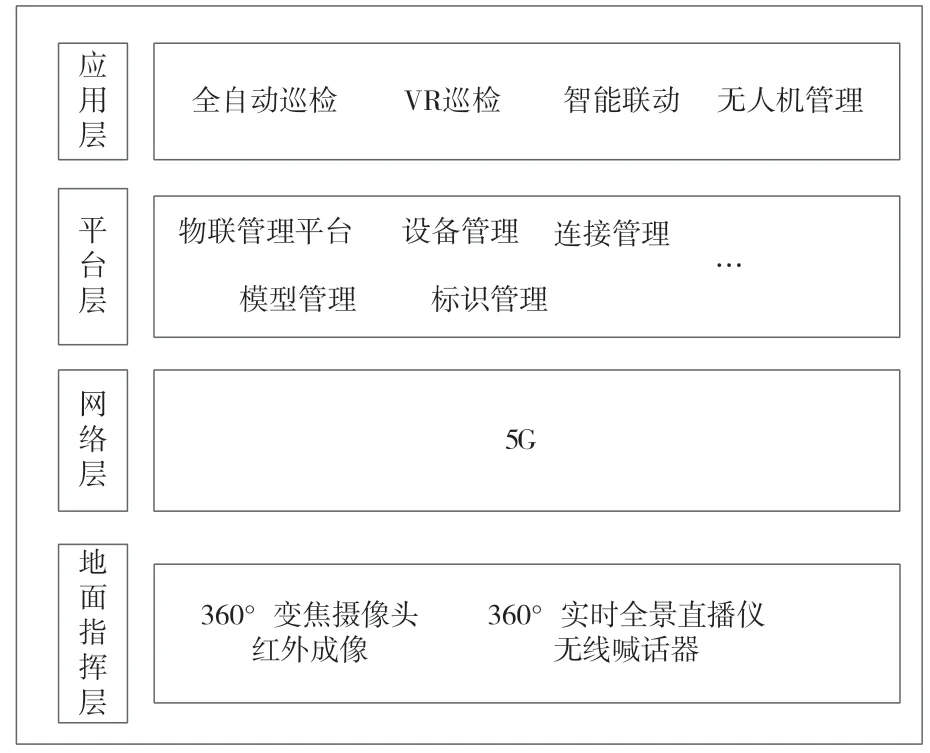
ąD1 ›ĒŽäĺĬ∑üo»ňôC—≤ôz∆ĹŇ_ŌĶĹyľ‹ėč
1.2 ›ĒŽäĺĬ∑—≤ôząDŌŮÓAŐéņŪ
Šėƶ≤…ľĮĶńąDŌŮŖM––≥ű≤ĹŐéņŪ£¨“‘ŐŠłŖąDŌŮŔ|ŃŅ£¨úp…Ŕ‘Ž¬ēļÕł…Ē_£¨≤ĘŹń÷–ŐŠ»°”–”√Ķń–ŇŌĘ°£Ō»ĆĘ≤ …ęąDŌŮřDĽĮ일“∂»ąDŌŮ£¨≥£”√Ķń∑Ĺ∑® « Ļ”√ľ”ôŗ«ůļÕĶń∑Ĺ Ĺ”čň„Ľ“∂»÷Ķ[5]°£Ľ“∂»÷ĶGr(x,y)Ķń”čň„Ļę Ĺěť
Ĺ÷–£ļR(x,y)°ĘG(x,y)°ĘB(x,y)∑÷ĄeěťąDŌŮ÷–ń≥āÄŌŮňōőĽ÷√(x,y)Ķńľt°ĘĺG°Ęň{Õ®ĶņĶńŃŃ∂»÷Ķ°£
ņŻ”√ěV≤®≤Ŕ◊ų∆ĹĽ¨ąDŌŮ£¨»•≥ż‘Ž¬ēļÕľöĻĚ[6]°£ěV≤®ļůąDŌŮ‘ŕőĽ÷√(x,y)ŐéĶńŌŮňō÷Ķěť
Ĺ÷–£ļ¶“ěťłŖňĻļňĶńėňú ≤Ó°£
‘ŲŹä≤Ŕ◊ųŅ…“‘łń…∆ąDŌŮĶńƶĪ»∂»ļÕľöĻĚ[7]°£‘ŲŹäļůĶńŌŮňō÷Ķěť
Ĺ÷–£ļf(x,y) ěť‘≠ ľąDŌŮ‘ŕőĽ÷√(x,y) ŐéĶńŌŮňō÷Ķ£ĽCDF[f(x,y)]ěť‘≠ ľąDŌŮŌŮňō÷Ķf(x,y)ĶńņŘ∑e∑÷≤ľļĮĒĶ£ĽCDFminěťņŘ∑e∑÷≤ľļĮĒĶĶń◊Ó–°÷Ķ£ĽM°ŃNěťąDŌŮīů–°£ĽL-1 일“∂»ľČĒĶŃŅ°£
1.3 üo»ňôC›ĒŽäĺĬ∑ŅžňŔ—≤ôz
üo»ňôC›ĒŽäĺĬ∑ŅžňŔ—≤ôzĶńÉ»»›įŁņ®ģźőÔŐĹúyŇc«Ś’Ō°ĘóUňĢ†Óõr‘uĻņ°ĘĺĬ∑—≤ôz°ĘĒĶďĢ∑÷őŲŇcąůłś…ķ≥…“‘ľįĻ ’Ō‘\ĒŗŇcĺS–ř÷ß≥÷[8]°£ĆĘüo»ňôC ’ľĮĶńĒĶďĢāų›Ē÷Ń÷łď]÷––ńŖM––ĒĶďĢ∑÷őŲļÕŐéņŪ£¨…ķ≥…—≤ôząůłś°£‘ŕįl…ķĺĬ∑Ļ ’Ōēr£¨üo»ňôCŖÄŅ…“‘ěťĺS–ř»ňÜTŐŠĻ©Ŗh≥Ő÷ß≥÷ļÕ‘\ĒŗĻ¶ń‹°£Õ®Ŗ^Ŗ@∑N›ĒŽäĺĬ∑ŅžňŔ—≤ôz∑Ĺ∑®£¨ń‹ČÚłŖ–ß°Ęú ī_ĶōĪOúyĺĬ∑į≤»ę«ťõr°£
üo»ňôC›ĒŽäĺĬ∑ŅžňŔ—≤ôz «“Ľ∑NĆĘüo»ňôCľľ–gŇcąDŌŮŐéņŪ°ĘĒĶďĢ∑÷őŲĶ»ÓI”ÚŌŗĹYļŌ£¨Ćć¨Fƶ›ĒŽäĺĬ∑Ķń◊‘Ą”ĽĮ—≤ôzļÕĻ ’ŌôzúyĶńĄď–¬–‘∑Ĺ∑®°£∆šĽýĪĺňľŌŽ «ņŻ”√üo»ňôCīÓ›dĶńÔw––Ņō÷∆ŌĶĹy°Ęāųł–∆ų°ĘłŖ∑÷Īś¬ ĒzŌŮÓ^ę@»°›ĒŽäĺĬ∑ĶńąDŌŮĒĶďĢ£¨»ĽļůÕ®Ŗ^ąDŌŮŐéņŪň„∑®ļÕôC∆ųĆWŃēń£–ÕƶąDŌŮĒĶďĢŖM––∑÷őŲļÕ◊RĄe£¨Źń∂ÝŅžňŔ∂®őĽļÕ◊RĄeĺĬ∑Ļ ’ŌŁc[9-10]°£Õ®Ŗ^∂®ŃxŖmģĒĶńļĮĒĶ£¨ĹYļŌąDŌŮĒĶďĢļÕÓA”ĖĺöĶńń£–Õ£¨Ņ…“‘Ćć¨FŅžňŔ«“ú ī_ĶńĺĬ∑—≤ôz[11]°£ń£–ÕĶń”ĖĺöŖ^≥Ő…śľįīůŃŅĶńĒĶďĢėň◊ĘļÕŐō’ųŐŠ»°Ļ§◊ų°£Õ®Ŗ^ėň◊Ę“—÷™Ļ ’Ōė”ĪĺĶńļÕŐŠ»°’ż≥£ė”ĪĺĶńŐō’ų£¨Ņ…“‘”Ėĺö“ĽāÄ”––ßĶńôC∆ųĆWŃēń£–Õ£¨”√”ŕ◊RĄeąDŌŮ÷–ĶńĺĬ∑Ļ ’ŌŁc°£
2 ĆćÚě∑÷őŲ
2.1 ĆćÚěú āš
≤…”√ĪĪĺ©ĒĶ◊÷ĺG ŅŅ∆ľľ”––ßĻęňĺ…ķģaĶńLi-Airįň–ż“Ūüo»ňôC≤…ľĮ›ĒŽäĺĬ∑—≤ôząDŌŮ°£‘ď‘OāšįŁņ®»ę«ÚĆßļĹ–l–«ŌĶĹy£®Global Navigation Satellite System£¨GNSS£©ŽpŐžĺÄľįĹ” ’ôC°ĘNovatelĎT–‘úyŃŅÜő‘™£®Inertial measurement unit£¨IMU£©∂®őĽ◊ňĎBŌĶĹy°ĘīśÉ¶Ņō÷∆Üő‘™°ĘőĘ–Õ”čň„ôC“‘ľįĒĶīaĒzŌŮÓ^£¨»ÁąD2 ňý ĺ°£

ąD2 Li-Air įň–ż“Ūüo»ňôC
‘ďüo»ňôCīÓ›dVelodyne VLP-16 āųł–∆ų£¨úyĺŗ∑∂áķěť100 m£¨íŖ√ŤĹ«∂»ěťīĻ÷Ī∑ĹŌÚ°ņ15°„°Ęňģ∆Ĺ∑ĹŌÚ360°„°£üo»ňôCĶńÔw––łŖ∂»ěť40 m£¨Ôw––ňŔ∂»ěť3.6 m/s£¨∆ĹĺýŁc‘∆√‹∂»ěť370 āÄ/m2£¨◊ÓīůĽō≤®īőĒĶěť1 īő°£
2.2 ĆćÚěĹYĻŻ
∆ĹĺýĹ^ƶ’`≤Ó «ļ‚ŃŅüo»ňôC—≤ôz–‘ń‹ĶńÍPśI÷łėň£¨ľī…ķ≥…ĶńÔ@÷Ý–‘ąDŌŮŇcĆćŽHÔ@÷Ý–‘ąDŌŮ÷ģťgĶń’`≤Ó°£∆ĹĺýĹ^ƶ’`≤Ó÷Ķ‘Ĺ–°£¨īķĪŪ…ķ≥…Ô@÷Ý–‘ńŅėňąDŌŮĶńŔ|ŃŅ‘Ĺļ√£¨ôzúyĺę∂»‘ĹłŖ°£∆ĹĺýĹ^ƶ’`≤Ó”čň„Ļę Ĺěť
∆š÷–£¨B°ĘL∑÷ĄeĪŪ ĺüo»ňôC—≤ôząDŌŮĶńťL°ĘĆí£ĽE(x,y)ĪŪ ĺ…ķ≥…Ô@÷Ý–‘ąD£ĽE'(x,y)ĪŪ ĺĆćŽHÔ@÷Ý–‘ąD°£
īňīőĆćÚě‘O∂®10 Źąüo»ňôC—≤ôząDŌŮĻ≤”–100 āÄÔ@÷Ý–‘ńŅėň£¨≤…”√Īĺőń∑Ĺ∑®°ĘőńęI[1]∑Ĺ∑®ŇcőńęI[2]∑Ĺ∑®ŖM––Ô@÷Ý–‘ńŅėňôzúy£¨ĹYĻŻ»ÁąD3 ňý ĺ°£
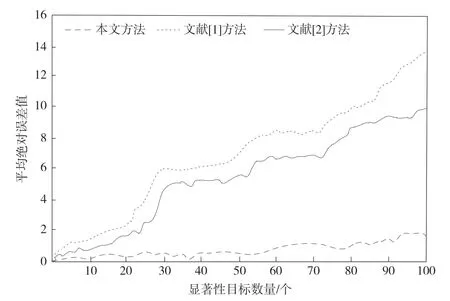
ąD3 ∆ĹĺýĹ^ƶ÷Ķ’`≤ÓĹYĻŻ
”…ąD3 Ņ…÷™£¨őń’¬ňýŐŠ∑Ĺ∑®‘ŕ›ĒŽäĺĬ∑—≤ôz÷–Ķń∆ĹĺýĹ^ƶ’`≤Ó÷Ķ√ųÔ@–°”ŕőńęI[1]∑Ĺ∑®ļÕőńęI[2]∑Ĺ∑®£¨‘ŕÕÍ≥…›ĒŽäĺĬ∑—≤ôz»őĄ’ērĪŪ¨F›^ļ√°£īňÕ‚£¨∆ĹĺýĹ^ƶ’`≤Ó÷Ķ‘Ĺ–°ĪŪ√ųĺĬ∑őĽ÷√∂®őĽļÕĻ ’ŌôzúyĶńú ī_–‘łŁłŖ°£“Úīň£¨≤…”√łŁĺęī_Ķńāųł–∆ų≤Ę“ż»ŽłŁŌ»ŖMĶńąDŌŮŐéņŪň„∑®£¨ń‹ČÚłŁú ī_Ķōę@Ķ√ĺĬ∑ĶńőĽ÷√–ŇŌĘ≤Ę◊RĄe≥ŲĚď‘ŕĶńĻ ’ŌŁc°£
ěťÚě◊Cüo»ňôC›ĒŽäĺĬ∑—≤ôzĶńňŔ∂»£¨ŇcőńęI[1]∑Ĺ∑®ļÕőńęI[2]∑Ĺ∑®ŖM––ńŅėňôzúyĶńērťgť_šN∑÷őŲ£¨ĹYĻŻ»ÁąD4 ňý ĺ°£
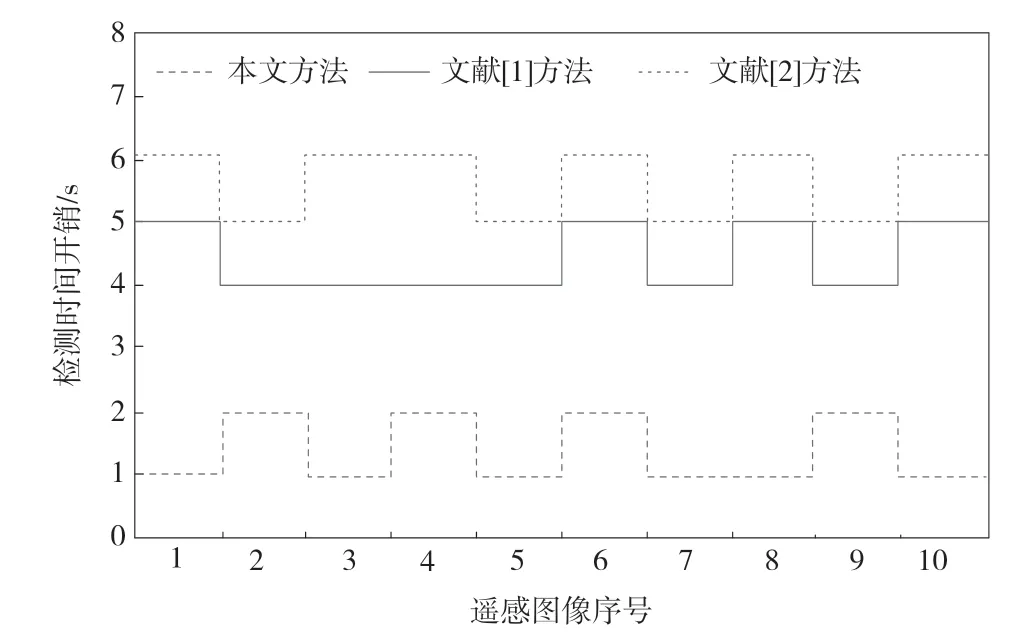
ąD4 ērťgť_šN∑÷őŲ
”…ąD4 Ņ…÷™£¨őń’¬ňýŐŠ∑Ĺ∑®‘ŕńŅėňôzúyĶńērťgť_šN∑Ĺ√śĪŪ¨F◊Óľ—£¨ÉH”√Ńň14 s£ĽőńęI[1]∑Ĺ∑®ĶŁīķīőĒĶ›^∂ŗ£¨Ćß÷¬ôzúyňý–Ťērťg›^ťL£¨–Ť“™44 s£ĽőńęI[2]∑Ĺ∑®”…”ŕŖ\ň„Žy∂»›^īů£¨ÕÍ≥…—≤ôz»őĄ’Ąt–Ť“™56 s°£“Úīň£¨őń’¬ňýŐŠ∑Ĺ∑®ń‹ČÚ”––ßúp…Ŕ”čň„ŃŅļÕĶŁīķīőĒĶ£¨Źń∂ÝÔ@÷ÝŅs∂ŐńŅėňôzúyērťg°£Ŗ@ŖM“Ľ≤ĹÚě◊CŃňňýŐŠ∑Ĺ∑®ĶńłŖ–ß–‘ļÕĆć”√–‘£¨‘ŕüo»ňôC›ĒŽäĺĬ∑—≤ôz÷–ń‹ČÚłŁŅžňŔĶōÕÍ≥…»őĄ’°£
3 ĹY ’ď
Õ®Ŗ^Ľý”ŕ5G Õ®–Ňľľ–gĶńüo»ňôC›ĒŽäĺĬ∑ŅžňŔ—≤ôz∑Ĺ∑®£¨ń‹ČÚ”––ßĹ‚õQāųĹy—≤ôz∑Ĺ∑®īś‘ŕĶń–߬ ĶÕŌ¬ļÕ»ňѶŔY‘īŌŻļńīůĶ»ÜĖÓ}°£‘ď∑Ĺ∑®ņŻ”√üo»ňôCīÓ›dłŖ«ŚĒzŌŮÓ^ļÕľtÕ‚üŠŌŮÉx£¨Õ®Ŗ^5G ĺWĹjĆć¨FŇc÷łď]÷––ńĶńĆćērĒĶďĢāų›ĒļÕŖh≥Ő≤Ŕ◊ų°£ĹõŖ^“ĽŌĶŃ–ĆćÚěÚě◊C£¨‘ď∑Ĺ∑®ń‹ČÚÔ@÷ÝŐŠłŖ—≤ôz–߬ ļÕú ī_¬ £¨Õ¨ērĹĶĶÕ—≤ôz»ňÜTĶńÔLŽU£¨ÉěĽĮŔY‘īņŻ”√£¨ĺŖ”–›^ļ√ĶńĎ™”√Ér÷Ķ°£