š¬ę¬Ż║Ų¹▄ćūĘ╬▓ŅAŠ»╩ŪųŪ─▄▄ć▌vęĢėXī¦║ĮŽĄĮyųąĄ─ųžę¬čąŠ┐ā╚╚▌ĪŻįOėŗ┴╦ę╗éĆæ¬ė├ė┌ĮYśŗ╗»Ą└┬ĘŁhŠ│Ż¼╗∙ė┌å╬─┐ęĢėXĄ─Ų¹▄ćūĘ╬▓ŅAŠ»ŽĄĮyĪŻįōŽĄĮy░┤ššözŽ±ÖC╠ß╣®Ą─Ą└┬ĘłDŽ±ą“┴ąŻ¼╩ūŽ╚└¹ė├ę╗ĘNą┬Ą─▀ģŠēÖz£y╦ŃĘ©ūRäeŪ░ĘĮĄ└┬ĘŻ¼╚╗║¾└¹ė├╗ęČ╚Īó▀ģŠē║═ī”ĘQąįĄ╚╠žš„ūRäeŪ░ĘĮ▄ć▌vŻ¼ĮėŽ┬üĒĖ∙ō■Ū░║¾▄ćŠÓ┼ąöÓŲõ═■├{Ą╚╝ēŻ¼ūŅĮKŽ“±{±éåT╠ß╣®ŽÓæ¬Ą─┬Ģ╣Ōł¾Š»ą┼╠¢ĪŻįōŽĄĮyęčį┌║ŽĘ╩Ą─Ė▀╦┘╣½┬Ę╔Ž▀Mąą┴╦īŹ“×ĪŻīŹ“×ĮY╣¹’@╩ŠŻ¼ŽĄĮy▀\ąą╦┘Č╚▀_ĄĮ▄ć▌v±{±éĄ─īŹĢrąįę¬Ū¾Ż¼─▄ē“═Ļ│╔▄ć▌vÖz£y║═┼÷ū▓ŅAŠ»Ą─╚╬äšĪŻ
0 ę²čį
╗∙ė┌ėŗ╦ŃÖCęĢėXĄ─Ė▀╦┘╣½┬ĘĘ└ū▓ŽĄĮy╩Ū«öŪ░ųŪ─▄Į╗═©╣▄└ĒŽĄĮy蹊┐Ą─¤ß³cų«ę╗ĪŻ╚ń║╬į┌ČÓūāĄ─ŁhŠ│Ž┬┐ņ╦┘£╩┤_ĄžÅ─ęĢŅlłDŽ±└’Öz£yĄĮ▄ćĄ└║═Ū░ĘĮ▄ć▌v╩ŪīŹ¼F▀@ŅÉŽĄĮy├µ┼RĄ─ūŅĻPµIå¢Ņ}ĪŻĮ³20─ĻüĒŻ¼ć°ā╚═Ō║▄ČÓ蹊┐╚╦åTī”▀@éĆå¢Ņ}▀Mąą┴╦┤¾┴┐蹊┐Ż¼╠ß│÷┴╦ČÓĘNČÓśėĄ─īŹė├╦ŃĘ©▓ó│╔╣”ķ_░l┴╦ę╗ą®ęĢėXŽĄĮyĪŻ▀@ą®ŽĄĮy╦∙▓╔ė├Ą─╦ŃĘ©╗∙▒Š╔Ž┐╔ęįĘų×ķ╗∙ė┌ļp─┐ęĢėXĄ─ĘĮĘ©Īó╗∙ė┌▀\äėĄ─ĘĮĘ©Īó╗∙ė┌═Ōą╬Ą─ĘĮĘ©║═╗∙ė┌ų¬ūRĄ─ĘĮĘ©ĪŻ╗∙ė┌ļp─┐┴ó¾węĢėXĄ─ĘĮĘ©ėŗ╦Ń┴┐┤¾Ż¼ąĶę¬╠ž╩Ōė▓╝■ų¦│ųŻ╗╗∙ė┌▀\äėĄ─ĘĮĘ©Ż¼¤oĘ©Öz£yņoų╣─┐ś╦ŪęīŹĢrąį▓ŅŻ╗╗∙ė┌═Ōą╬Ą─ĘĮĘ©Ż¼ę“Į©┴óėąą¦Ą─┼Óė¢śė▒Š╚į╚╗╩ŪąĶę¬čąŠ┐Ą─å¢Ņ}Ż╗╗∙ė┌ų¬ūRĄ─ĘĮĘ©Ż¼į┌šŽĄK╬’öĄ┴┐▌^╔┘Ģrą¦┬╩▌^Ė▀Ż¼Ą½Å═ļsŁhŠ│Ž┬Õeš`┬╩ėą╦∙į÷╝ėĪŻ
ßśī”│ŻęÄ╦ŃĘ©Ą─▓╗ūŃŻ¼▒Š╬─įOėŗ┴╦ę╗ĘNŠ½Č╚Ė▀Ż¼ĘĆČ©ąį║├Ą─╗∙ė┌å╬─┐ęĢėXĄ─▄ć▌dūĘ╬▓ŅAŠ»ŽĄĮyĪŻ╦³└¹ė├ę╗ĘNą┬Ą─▀ģŠēÖz£y╦ŃĘ©ūRäeŪ░ĘĮĄ└┬ĘŻ¼╚╗║¾└¹ė├ĻÄė░Öz£y┼cĖ·█ÖŽÓĮY║ŽĄ─ĘĮĘ©ūRäeŪ░ĘĮ▄ć▌vŻ¼ĮėŽ┬üĒĖ∙ō■Ū░║¾▄ćŠÓ┼ąöÓŲõ═■├{Ą╚╝ēŻ¼ūŅĮKŽ“±{±éåT╠ß╣®ŽÓæ¬Ą─┬Ģ╣Ōł¾Š»ą┼╠¢ĪŻ
1 ŽĄĮy╣żū„įŁ└Ē
ŽĄĮyė▓╝■▓┐Ęų░³└©MCC-4060ą═CCDözŽ±ÖCĪóVT-121ęĢŅl▓╔╝»┐©ĪóGPSĪóPC-104╣ż┐žÖC║═’@╩ŠĮKČ╦ĪŻGPS═©▀^┤«┐┌Ž“╣ż┐žÖC░l╦═▒Š▄ć▄ć╦┘ą┼ŽóŻ¼░▓čbį┌▄ćā╚ō§’L▓Ż┴¦║¾Ą─CCDözŽ±ÖCīółDŽ±Ä¼═©▀^ęĢŅl▓╔╝»┐©╦═╚ļ╣ż┐žÖCŻ¼Įø▀^▄ø╝■Ą─╠Ä└ĒĘų╬÷║¾Ż¼į┌’@╩ŠĮKČ╦╔Žś╦ūó│÷Ū░▄暎ĄK╬’║═Ą└┬Ęś╦ŠĆŻ¼═¼ĢrĖ∙ō■▄ć╦┘ĪóķgŠÓĄ╚┼ąöÓ╬ŻļUĄ╚╝ēŻ¼░l│÷ŽÓæ¬Ą─┬Ģ╣Ōł¾Š»ą┼╠¢Ż╗
ŽĄĮyĄ─▄ø╝■▓┐Ęų░³└©Ą└┬ĘÖz£yĪóĄ└┬ĘĖ·█ÖĪó▄ć▌vÖz£yĪó▄ć▌vĖ·█ÖĪó£yŠÓĪóøQ▓▀║═ł¾Š»Ą╚─ŻēKĪŻ«ö▄ć╦┘▀_ĄĮ60km/hĢrŻ¼ŽĄĮyķ_╩╝╠Ä└ĒīŹĢr▓╔╝»ĄĮĄ─łDŽ±ą“┴ąĪŻī”ė┌├┐ę╗ļłDŽ±Ż¼╩ūŽ╚Öz£y▓óĖ·█ÖłDŽ±ųąĄ─▄ćĄ└░ūŠĆŻ¼╚╗║¾į┌▄ćĄ└┤_Č©Ą─Ėą┼d╚żģ^ė“ā╚Öz£y▄ć▌vĪŻ╚ń╣¹┤µį┌ę╔╦ŲšŽĄK▄ć▌vŻ¼ätåóäė▄ć▌vĖ·█ÖŻ¼└¹ė├Ė·█Öą┼Žó▀Mę╗▓Į┼┼│²╠ōŠ»ĪŻį┌īŹ¼Fī”šŽĄK▄ć▌vĘĆČ©Ė·█Ö║¾Ż¼╣└╦Ń│÷ā╔▄ćķgŠÓ║═ŽÓī”▀\äė╦┘Č╚Ż¼┼ąČ©Ųõ═■├{Ą╚╝ēŻ¼▓ó░l│÷ŽÓæ¬Ą─ł¾Š»ą┼╠¢ĪŻ
2 ŽĄĮyĻPµI╝╝ąg
2.1 Ą└┬ĘÖz£y
─┐Ū░Ż¼▄ćĄ└ŠĆÖz£y╦ŃĘ©ų„ę¬▀mė├ė┌╣Ōšš│õūŃĄ─ŁhŠ│Ž┬ĪŻė╔ė┌▄ćĄ└ŠĆ┼c┬Ę├µų«ķgī”▒╚Č╚┤¾Ż¼ę“┤╦║▄╚▌ęū└¹ė├Ė„ĘN│ŻęÄ▀ģŠēÖz£y╦Ńūė½@Ą├ŪÕ╬·Ą─▄ćĄ└▌å└¬ą┼ŽóŻ¼╚╗║¾▀x╚Ī║Ž▀mĄ─ķōųĄī”łDŽ±▀MąąČ■ųĄ╗»╠Ä└ĒŻ¼ūŅ║¾▓╔ė├HoughūāōQūRäe▄ćĄ└ŠĆĪŻ╚╗Č°į┌Å═ļs╣ŌššŁhŠ│Ž┬Ż¼łDŽ±Ģ■╩▄ĄĮĖ„ĘN╣ŌŠĆų▒╔õ║═╬’¾wČÓ┤╬Ę┤╔õą╬│╔ļs╔ó╣ŌĄ─Ė╔ö_Ż¼łDŽ±╣ŌÅŖ▓╗─▄Ę┤ė│▄ćĄ└▒Š╔Ē═╗ūāąį┘|Ż¼ī¦ų┬¤oĘ©š²┤_Öz£y│÷▄ćĄ└ĪŻ
▒ŠŽĄĮy▓╔ė├┴╦ę╗ĘN└¹ė├╣Ō├▄Č╚▓ŅĄ├ĄĮ▄ćĄ└ś╦ŠĆ┼c┬Ę├µĘ┤╔õ┬╩▓ŅŻ¼▀MČ°▀MąąĘŪŠĆąį▀ģŠēÖz£yŻ¼į┘▀MąąHoughūāōQĄ─▄ćĄ└Öz£y╦ŃĘ©ĪŻ┤╦╦ŃĘ©┐╔ęįėąą¦ĮŌøQį┌Å═ļs╣ŌššŚl╝■Ž┬Ą─▄ćĄ└Öz£yŻ¼ę▓┐╔ęįė├ė┌ę╣ķgĄ─▄ćĄ└Öz£yĪŻ
┴Ē═ŌŻ¼─┐Ū░▄ćĄ└ŠĆĄ─Ė·█Ö蹊┐ų„ę¬▓╔ė├╣╠Č©ģ^ė“Ę©╗“š▀Kalman×V▓©Ę©Ż¼Ė∙ō■Ū░ę╗ļ▄ćĄ└ŠĆÖz£yĄ─ĮY╣¹üĒäØĘųĖą┼d╚żģ^ė“Ż¼ęįīŹĢrĖ·█Ö▄ćĄ└ŠĆĪŻ╚╗Č°Ż¼╣╠Č©ģ^ė“Ę©ī”2ļłDŽ±Ą─ŽÓĻPąįę└┘ć┤¾Ż¼äØĘųĖą┼d╚żģ^ė“┤¾Ż¼īŹĢrąį▓ŅŻ╗Č°Kalman×V▓©Ę©äØĘųĖą┼d╚żģ^ė“ąĪŻ¼╚▌ęū«a╔·Öz£yš`▓ŅŻ¼Č°įņ│╔Ė·█Öš`▓Ņ└█ĘeŻ¼Ė·█Öš²┤_┬╩▓╗Ė▀ĪŻę“┤╦Ż¼▒ŠŽĄĮyį┌Ė·█Ö▄ćĄ└ŠĆĢr▓╔ė├┴╦ę╗ĘN╚┌║Ž╣╠Č©ģ^ė“Ę©║═KaIman×V▓©Ę©äØĘųĖą┼d╚żģ^ė“Ą─ą┬ĘĮĘ©ĪŻ
ę╗░ŃüĒšfŻ¼ų╗īó▄ćĄ└▀ģĮńŠĆĮ╗³c(╝┤£ń³c)ęįŽ┬Īó2▄ćĄ└ŠĆų«ķgĄ─ģ^ė“ū„×ķĖą┼d╚żģ^ė“Ż¼┐╝æ]ĄĮ┐ńĄ└ąą±éĄ─▄ć▌vę└╚╗ī”▒Š▄ćėą═■├{Ż¼╦ŃĘ©░čā╔▄ćĄ└ŠĆĘųäeŽ“ā╔é╚ŲĮęŲ40éĆŽ±╦žŻ¼╩╣Ėą┼d╚żģ^ė“öUš╣ĄĮ┐╔ęįĖ▓╔w┐ńĄ└▄ć▌vĄ─ĘČć·ĪŻ
2.2 ▄ć▌vÖz£y
łDŽ±ųą░³║¼▄ć▌vŪ░ĘĮ║▄┤¾ęĢę░ā╚Ą─╬’¾wŻ¼╚ńĄ└┬ĘĪóśõ─ŠĪóūoÖ┌Īóś╦┼Ųęį╝░Ųõ╦¹▄ć▌vŻ¼ę¬Å─ųą£╩┤_Öz£y│÷Ū░ĘĮ▄ć▌v╩Ūę╗ĒŚ└¦ļyĄ─╣żū„Ż¼Č°▒Š╬─Ą─▄ć▌vÖz£y─ŻēKĢ■Ė∙ō■łDŽ±▒│Š░ūįäėĖ─ūāįOų├ģóöĄŻ¼ęį▀mæ¬▓╗öÓūā╗»Ą─Ą└┬Ęł÷Š░║═╣ŌššŚl╝■ĪŻ
ę¬īŹ¼F▄ć▌vĄ─┐ņ╦┘Öz£yŻ¼╩ūŽ╚ąĶę¬Ė∙ō■▄ć▌vĄ─╗∙▒Š╠žš„▀Mąą│§▓ĮÖz£yŻ¼īó╦∙ėą┐╔─▄Ą─ę╔╦Ų▄ć▌vģ^ė“Å─łDŽ±ųą╠ß╚Ī│÷üĒŻ¼╚╗║¾į┘Ė∙ō■Ųõ╦¹╠žš„ī”ę╔╦Ųģ^ė“▀Mąą║Y▀x┼┼│²ĪŻ
2.2.1 ▄ć▌v│§▓ĮÖz£y
│§▓ĮÖz£y▓╔ė├Ą─╠žš„╩Ū▄ć▌vĻÄė░Ż¼╝┤ę╗ēK╬╗ė┌─┐ś╦▄ć▌vĄū▓┐Īó╗ęČ╚ųĄ├„’@▒╚ĖĮĮ³┬Ę├µģ^ė“Ą═Ą─ģ^ė“ĪŻį┌ę╗░ŃŁhŠ│Śl╝■Ž┬Ż¼┤¾▓┐Ęų▄ć▌vČ╝Š▀ėą▀@ę╗’@ų°╠žš„ĪŻ
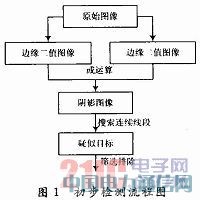
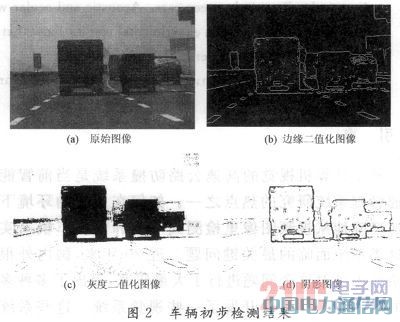
▄ć▌v│§▓ĮÖz£yĄ─┴„│╠╚ńłD1╦∙╩ŠĪŻ▄ć▌vĻÄė░║═▄ćĄ└ę╗śėŠ▀ėą╗ęČ╚═╗ūāĄ─╠ž³cŻ¼ę“┤╦┐╔ęįš{ė├▄ćĄ└Öz£y╦ŃĘ©ī”łD2(a)ųąĄ─įŁ╩╝łDŽ±ū÷Č■ųĄ╗»╠Ä└ĒŻ¼Ą├ĄĮłD2(b)ųąĄ─▀ģŠēČ■ųĄ╗»łDŽ±ĪŻ═¼Ģr▀Ćę¬ī”įŁ╩╝łDŽ±▀Mąą╗ęČ╚Č■ųĄ╗»Ż¼Ą├ĄĮłD2(c)ųąĄ─╗ęČ╚Č■ųĄ╗»łDŽ±ĪŻ×ķ╠ßĖ▀Öz£yīŹĢrąįŻ¼ęį▒Š▄ćĖĮĮ³┬Ę├µģ^ė“Ą─ŲĮŠ∙╗ęČ╚ū„×ķČ■ųĄ╗»ķōųĄĪŻė╔ė┌▀ģŠēČ■ųĄ╗»łDŽ±║═╗ęČ╚Č■ųĄ╗»łDŽ±Č╝░³└©┴╦▄ć▌vĄ─Ž┬Ąū▀ģŻ¼īó▀@ā╔Ę∙łDŽ±▀Mąą“╗“”▀\╦ŃŻ¼Š═┐╔ęįĄ├ĄĮ╚ńłD2(d)╦∙╩ŠĄ─▄ć▌vĻÄė░łDŽ±ĪŻ
į┌ĻÄė░łDŽ±ųąė╔Ž┬ų┴╔Žųąą╦č╦„Ż¼īżšę▀B└mĻÄė░³c│¼▀^ę╗Č©ķōųĄĄ─ŠĆČ╬Ż¼▓óęį┤╦ŠĆČ╬×ķĄū▀ģäØ│÷ę╗éĆŠžą╬ģ^ė“ū„×ķę╔╦Ų▄ć▌vģ^ė“ĪŻ×ķ▒ŻūCę╔╦Ųģ^ė“░³║¼▄ć▌vš¹¾wŻ¼Šžą╬Ą─īÆČ╚▒╚ŠĆČ╬╔įīÆŻ¼Ė▀Č╚ė╔īÆČ╚░┤▒╚└²Įo│÷ĪŻ×ķ▒▄├ŌųžÅ═╦č╦„Ż¼īóęč╦č╦„ĄĮĄ─ę╔╦Ųģ^ė“ā╚ĻÄė░═Ļ╚½─©╚źĪŻė╔ė┌═¼ę╗▄ć▌vĄ─Ė„éĆ▓┐Ęų┐╔─▄Ęųäe▒╗Öz£y×ķę╔╦Ų─┐ś╦Ż¼ę“┤╦▀ĆąĶę¬ī”Ė„éĆŽÓĮ╗Ą─ę╔╦Ųģ^ė“▀Mąą║Ž▓óĪŻė╔ė┌Ū░ĘĮ▄ć▌vĄ─š┌ō§Ż¼┐╔─▄Ģ■īóČÓéĆ─┐ś╦šJČ©×ķę╗éĆ─┐ś╦Ż¼Ą½╩Ūī”▒Š▄ćĄ─░▓╚½¤oė░ĒæĪŻ
2.2.2 ║Y▀x“×ūC
╚ń╣¹å╬╝ā▓╔ė├ĻÄė░╠žš„▀Mąą▄ć▌vÖz£yŻ¼į┌▒ŻūC▌^Ą═“┬®Š»”┬╩Ą─═¼ĢrŻ¼ę▓įņ│╔┴╦▌^Ė▀Ą─“╠ōŠ»”┬╩Ż¼ę“┤╦▀ĆąĶę¬ī”ę╔╦Ųģ^ė“▀Mąą║Y▀x║═“×ūCĪŻ
ī”ė┌ĮYśŗ╗»Ą└┬ĘŻ¼▄ć▌vīÆČ╚┼c▄ćĄ└īÆČ╚Ą─▒╚ųĄæ¬įō╩Ū┤¾ų┬╣╠Č©Ą─Ż¼─Ū├┤«öözŽ±ÖCĄ─Į╣ŠÓĪóĖ®č÷ĮŪĄ╚ģóöĄ╣╠Č©║¾Ż¼łDŽ±╔Ž▄ćĄ└īÆČ╚(Ž±╦žöĄ)┼c▄ć▌vīÆČ╚(Ž±╦žöĄ)ę▓ØMūŃ▀@éĆ▒╚└²ĪŻĖ∙ō■ų«Ū░Öz£yĄ─▄ćĄ└ĘĮ│╠Ż¼Š═┐╔ęįėŗ╦Ń│÷Ėą┼d╚żģ^ė“ā╚╚╬ęŌ┐vū°ś╦╔Ž▄ć▌vłDŽ±īÆČ╚Ą─ĘČć·Ż¼▓ó╠▐│²īÆČ╚▓╗į┌┤╦ĘČć·ā╚Ą─ę╔╦Ųģ^ė“ĪŻ
į┌ęį═∙Ą─▄ć▌v“×ūCĘĮĘ©ųąŻ¼ūŅ│Żė├Ą─╩Ūī”ĘQąį£yČ╚“×ūCĪŻ▀@ĘN╦ŃĘ©Ą─ėŗ╦Ń┴┐▌^┤¾Ż¼Ūęī”ė┌▒│Š░Å═ļsŻ¼ī”ĘQČ╚▓ŅłDŽ±Ą─“×ūCą¦╣¹▓╗▒M╚╦ęŌĪŻ×ķ┴╦ĮŌøQ▀@éĆå¢Ņ}Ż¼įōŽĄĮy▓╔ė├┴╦ę╗ĘN╗∙ė┌▀ģŠēČ■ųĄ╗»łDŽ±Ż¼═©▀^╦č╦„▄ć▌vū¾ėę▀ģŠē▀Mąą“×ūCĄ─╦ŃĘ©ĪŻ
╝┘įOę╔╦Ųģ^ė“Ą─īÆČ╚×ķWŻ¼ģ^ė“ū¾▀ģŠēĄ─ū°ś╦×ķ(X1Ż¼Y1)Ż¼ėę▀ģŠēĄ─╦«ŲĮū°ś╦×ķ(X2Ż¼Y2)ĪŻČ©┴x║»öĄŻ║
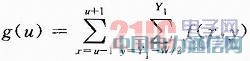
╩ĮųąŻ║f(xŻ¼y)×ķ(xŻ¼y)³cĄ─╗ęČ╚ųĄĪŻį┌ģ^ķg(X1-W/4Ż¼X1+W/4)ā╚╦č╦„g(u)Ą─ūŅ┤¾ųĄ³cŻ¼įō³cī”æ¬Ą─╦«ŲĮū°ś╦X1’Š═╩Ū▄ć▌vĄ─ū¾▀ģŠēū°ś╦ĪŻ═¼└Ēę▓┐╔ęį╦č╦„ĄĮ▄ć▌vĄ─ėę▀ģŠēX2’ĪŻ╚ń╣¹ū¾ėę▀ģŠēĄ─g(u)ųĄŠ∙┤¾ė┌─│ķōųĄŻ¼─Ū├┤Š═┐╔ęįšJČ©įō▄ć▌v┤_īŹ┤µį┌ĪŻīŹ“×ūC├„Ż¼įō╦ŃĘ©─▄┼┼│²Ą¶┤¾┴┐Ą─“╠ōŠ»”ģ^ė“▓óĄ├ĄĮšµīŹ▄ć▌vĄ─ā╔é╚▀ģŠēĪŻ
2.3 ▄ć▌vĖ·█Ö
¼FĻPą─Ą─╩ŪŪ░ĘĮ▄ć▌v┼c▒Š▄ćŽÓī”Ą─Č■ŠS╬╗ų├║═╦┘Č╚Ż¼ę“┤╦ų╗ąĶę¬╩╣ė├┐©Ā¢┬³×V▓©Ų„ŅA£yÖMū°ś╦xĪóÖMŽ“╦┘Č╚VxĪó┐vū°ś╦yĪó┐vŽ“ū°ś╦Vy▀@╦─éĆĀŅæBŽ“┴┐ĪŻ┤╦═Ōė╔ė┌xĘĮŽ“║═yĘĮŽ“Ą─ĀŅæBŽ“┴┐ø]ėąų▒Įė┬ōŽĄŻ¼╦∙ęį┐╔ęįīóŲõĘų×ķā╔ĮMĘųäe╠Ä└ĒĪŻ
į┌▄ć▌vąą±é▀^│╠ųąŻ¼ė╔ė┌ŅŹ¶ż╗“š┌ō§Ą╚įŁę“Ż¼ŽĄĮy┐╔─▄Ģ■īó┬Ę┼ŲĪó╣Ó─Šģ▓Ą╚╬’¾wš`šJ×ķ╩Ū▄ć▌vÖz£y│÷üĒŻ¼«a╔·╠ōŠ»ĪŻČ°▀@ą®╠ōŠ»╬’¾w═∙═∙ų╗─▄į┌▀B└möĄÄ¼łDŽ±ųą┤µį┌ĪŻ╚ń╣¹▓╗▓╔╚Ī┤ļ╩®Ż¼ŽĄĮyŠ═Ģ■Ģr│Ż«a╔·Č╠┤┘Ą─ł¾Š»ĪŻ
«öłDŽ±▓╔śėķgĖ¶ūŃē“Č╠ĢrŻ¼ŽÓÓÅļā╚═¼ę╗▄ć▌vĄ─╬╗ų├Ģ■Š▀ėą║▄┤¾Ą─ŽÓĻPąįĪŻ
ŽĄĮy▓╔ė├Öz£y┼cĖ·█ÖŽÓĮY║ŽĄ─ĘĮĘ©Ż¼Ė∙ō■Ą┌nļłDŽ±½@Ą├Ą─ą┼ŽóŻ¼ŅA£y▄ć▌vį┌Ą┌n+1ļłDŽ±ųąĄ─╬╗ų├Ą╚ą┼ŽóŻ¼▓ó┼cn+1ļłDŽ±ųąīŹļHÖz£yĄĮĄ─ĮY╣¹▀Mąą▒╚ī”ĪŻ╚ń╣¹Č■š▀Ųź┼õČ╚ūŅ┤¾Ūę│¼│÷ę╗Č©ųĄŻ¼ätšJČ©×ķ═¼ę╗▄ć▌vŻ¼└^└m▀MąąĖ·█ÖĪół¾Š»Ż¼Ę±ätšJ×ķ┤╦▄ćęč▒╗š┌ō§╗“Ž¹╩¦Ż¼Ģ║Ģr▓╗ū÷╠Ä└ĒŻ¼öĄÄ¼║¾▒╗╠▐│²│÷╚źĪŻ
2.4 £yŠÓł¾Š»
▄ćķg£yŠÓ═©│Ż▓╔ė├Äū║╬═Čė░─Żą═Ż¼▓╔ė├┴╦ę╗ĘN║å╗»Ą─▄ćŠÓ─Żą═╣½╩ĮL×W=CŻ¼ŲõųąL×ķā╔▄ćķgŠÓŻ¼å╬╬╗×ķmŻ╗W×ķłDŽ±╔Ž─┐ś╦▄ć▌v╠Ä▄ćĄ└īÆČ╚Ż¼å╬╬╗×ķpixelŻ╗C×ķ│ŻöĄŻ¼┐╔═©▀^╩┬Ž╚Ą─ś╦Č©½@Ą├ĪŻ╚╗Č°ā╔▄ćķg░▓╚½▄ćŠÓS▓╔ė├╬─½I═Ųī¦Ą─┼RĮń░▓╚½▄ćŠÓ╣½╩ĮäėæBĄ├ĄĮĪŻ
╩ĮųąŻ║Vr×ķŽÓī”▄ć╦┘Ż¼ė╔ī”£y│÷▄ćŠÓŪ¾ī¦Ą├ĄĮŽÓī”▄ć╦┘║¾▀Mąą┐©Ā¢┬³×V▓©Ą├ĄĮŻ╗Vb×ķ▒Š▄ć▄ć╦┘Ż¼ė╔GPSĄ├ĄĮĪŻ
╚ń╣¹ĖµŠ»Ņl┬╩▀^Ė▀Ż¼╚▌ęū╩╣±{±éåT┬ķ▒į┤¾ęŌŻ¼▀^Ą═┐╔─▄╩╣±{±éåTüĒ▓╗╝░ū÷│÷Ę┤æ¬Ż¼ę“┤╦įōŽĄĮy▓╔ė├ė╔▀hų┴Į³Ą─╚²Č╬ł¾Š»ĪŻ
╚¶▄ćŠÓd≥1.5SŻ¼┼ąČ©×ķ3╝ē═■├{Ż¼░l│÷ķLČ°ŠÅĄ─ł¾Š»┬ĢŻ¼╠ßąč±{±éåTŪ░ĘĮėąšŽĄK╬’Ż¼Ą½Ģ║¤o╬ŻļUŻ╗╚¶▄ćŠÓS≤d≤1.5SŻ¼┼ąČ©×ķ2╝ē═■├{Ż¼░l│÷▌^╝▒┤┘Ą─ł¾Š»┬ĢŻ¼╠ßąč±{±éåT£p╦┘Ż╗╚¶▄ćŠÓd≤SŻ¼┼ąČ©×ķ1╝ē═■├{Ż¼░l│÷Č╠Č°╝▒Ą─ł¾Š»┬ĢŻ¼╠ßąč±{±éåTųŲäėŻ╗3ĘNĀŅæBŽ┬Ą─ĖµŠ»┬Ģ▓Ņ«É║▄┤¾Ż¼±{±éåT┐╔ęį║▄╚▌ęūĄžĖ∙ō■ł¾Š»┬Ģ┼ąöÓ═■├{Ą╚╝ēĪŻ
3 įć“×ĮY╣¹
ŽĄĮy┐“╝▄╝░╦∙ėą╦ŃĘ©į┌Boiland C++ Builder 6ŁhŠ│Ž┬ŠÄūg═Ļ│╔ĪŻ×ķ┴╦“×ūCŽĄĮy╦ŃĘ©Ą─┐╔┐┐ąį║═īŹĢrąįŻ¼└¹ė├į┌║ŽĘ╩╩ąŁh│ŪĖ▀╦┘╣½┬Ę╔Ž▓╔╝»▓╗═¼▄ćą═Īó▓╗═¼┬ĘČ╬Īó▓╗═¼ŁhŠ│╣ŌŽ┬ČÓĮMĄ└┬ĘłDŽ±ū„×ķ£yįćą“┴ąŻ¼▀Mąą┴╦┤¾┴┐īŹ“×ĪŻ
łD3×ķĄõą═Ą└┬Ęł÷Š░Ž┬Ą─īŹ“×ĮY╣¹Ż¼łD3(a)×ķ┤¾ą═┐©▄ćŻ╗(b)×ķąĪą═├µ░³▄ćŻ╗(c)×ķ▀hŠÓļx╠ÄŻ╗(d)×ķĮ³ŠÓļx╠ÄĄ─Öz£yĮY╣¹ĪŻŽĄĮyīóÖz£yĄĮĄ──┐ś╦ė├║┌┐“ś╦ėø│÷üĒĪŻ
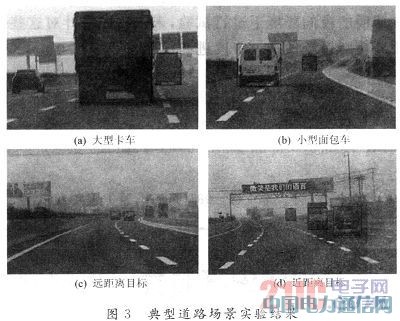
┐╔ęį┐┤│÷Ż¼ŽĄĮy─▄ē“Öz£yĄĮ▒Š▄ćĄ└ā╚▓╗═¼ŠÓļx╔ŽĄ─Ė„ĘN▄ćą═▄ć▌vĪŻį┌Ė▀╦┘╣½┬Ę╔ŽĄ─īŹ“×ĮY╣¹▒Ē├„Ż¼į┌ūŅ┤¾▄ć╦┘100 km/hĄ─ŪķørŽ┬Ż¼ŽĄĮyį┌Celeron M 600 MHz╠Ä└ĒŲ„╔ŽĄ─╠Ä└Ē╦┘Č╚×ķ8 j/sū¾ėęŻ¼ę▓Š═╩Ūšf╠Ä└Ēę╗ļłDŽ±Ą─Ģrķgā╚▄ć▌vąą±é3Ī½4 mŻ¼╗∙▒ŠØMūŃīŹĢrł¾Š»Ą─ę¬Ū¾ĪŻį┌ę╗░Ń╣ŌššŚl╝■Ž┬Ż¼ŽĄĮyš²│Żł¾Š»Ą─┐vŽ“ŠÓļx│¼▀^200 mŻ¼ęĢł÷ĮŪ▀h▀h┤¾ė┌└ū▀_(ę╗░Ń×ķ±7°)ĪŻ
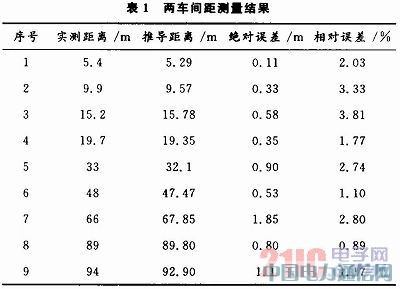
×ķ┴╦“×ūCå╬─┐ęĢėX£yŠÓ£╩┤_ąįŻ¼į┌╩ąā╚Ą└┬Ę╔Ž▓╔╝»┴╦Ū░▄ć┼c▒Š▄ćŠÓļxÅ─5Ī½100 mĄ─ę╗ĮMłDŽ±ĪŻī”▓╔╝»Ą─łDŽ±▀Mąą╠Ä└Ē║¾Ż¼Ė∙ō■╣½╩Į═Ųī¦│÷▒Š▄ć┼cŪ░▄ćŠÓļxęį╝░īŹļHŠÓļxęŖ▒Ē1ĪŻ▒ĒųąöĄō■’@╩ŠŻ¼å╬─┐ęĢėX£yŠÓĄ─ŽÓī”š`▓ŅČ╝į┌5Żźęįā╚Ż¼┐╔ęįØMūŃīŹļH╣żū„ųą£yŠÓĖµŠ»Ą─ąĶę¬ĪŻ
4 ĮYšZ
▒Š╬─įOėŗ┴╦ę╗éĆ╗∙ė┌å╬─┐ęĢėXĄ─Ų¹▄ćūĘ╬▓ŅAŠ»ŽĄĮyĪŻįōŽĄĮy▓╔ė├┴╦ę╗ĘN╗∙ė┌╣Ō├▄Č╚▓ŅĄ─Ą└┬ĘÖz£y╦ŃĘ©Ż¼▓ó╩╣ė├┴╦ę╗ĘNęį▄ć▌vĻÄė░Öz£y×ķų„Īóū¾ėę▀ģŠēÖz£y×ķ▌oĄ─▄ć▌v╠Į£yĘĮĘ©Ż¼═¼Ģr▓╔ė├┴╦║åå╬ĪóīŹė├Ą─£yŠÓ║═ł¾Š»ĘĮĘ©ĪŻĖ▀╦┘╣½┬Ę╔ŽĄ─īŹ“×ĮY╣¹ūC├„┴╦įōŽĄĮyĄ─īŹĢrąįĪó¶ö░¶ąį║═£╩┤_ąįĪŻįōŽĄĮy─┐Ū░▀Ćø]ėąį┌ėĻņF╠ņÜŌ╗“╚▒╔┘šš├„Ą─ę╣ķgŁhŠ│Ž┬▀Mąąįć“ׯ¼╬┤üĒ╬ęéāīóßśī”▀@ą®╩╣ė├ŁhŠ│ī”ŽĄĮyū÷▀Mę╗▓ĮĖ─▀M║═ā×╗»ĪŻ